Least-squares problems#
Least-squares problems occur in optimisation, data fitting and other fields of the mathematical sciences.
Consider a matrix \(A \in \mathbb{R}^{m \times n}\) and a vector \(a \in \mathbb{R}^m\). The central idea of the least-squares problem is to find a vector \(\hat{x} \in \mathbb{R}^n\) that minimises the Euclidean norm (or \(2\)-norm) of the residual vector \(Ax - a\). This problem is formulated as
Here \(\text{arg}\min_{x \in \mathbb{R}^n} \|Ax - a\|_2\) is the set of all \(x\) which minimise \(\|Ax - a\|_2\). If the minimiser is unique, we also write (with a slight abuse of notation)
Thus, in the least-squares sense, the optimisation problem generalises the concept of the solution to a system of linear equations: if \(A\) is invertible, then \(A \hat{x} = a\). If \(A\) is overdetermined, then \(\hat{x}\) aims to minimise the amount by which \(A \hat{x}\) fails to achieve equality with \(a\).
The normal equation#
The identity
is called the normal equation of the least-squares problem.
Theorem 6 (Normal equation of least-squares approximations)
Let \(A \in \mathbb{R}^{m \times n}\), \(a \in \mathbb{R}^m\). Then
if and only if \(\hat{x}\) satisfies the normal equation.
Proof. The vector \(\hat{x}\) minimises the least-squares problem if and only if for all \(\epsilon\in\mathbb{R}^n\):
Step 1: Suppose that \(\hat{x}\) does not satisfy the normal equation. Then \(\| A^\top A\hat{x} - A^\top a \|_2 > 0\). Suppose that \(\hat{x}\) minimises the least-squares problem. With \(\epsilon := \delta (A^\top A\hat{x} - A^\top a)\), \(\delta \in \mathbb{R}\), the above implies
This is a contradiction because \(\Phi(\delta) < 0\) for small negative \(\delta\).
Step 2: Suppose that \(\hat{x}\) satisfies the normal equation. Then, by the above,
Properties of the normal equation#
We assume in this section that \(m \ge n\) and that \(A\) has full rank. Let \(A = U\Sigma V^\top \in \mathbb{R}^{m \times n}\) be the SVD of \(A\). For a rectangular matrix with full column rank, we define its \(2\)-norm condition number by
We also have
guaranteeing the non-singularity of \(A^\top A\) and, therefore, the existence of a unique minimiser of the least-squares problem.
Furthermore,
It follows that the linear system in the normal equation has a squared condition number compared to the original matrix \(A\).
Subsequently, we will explore orthogonalisation methods to circumvent this condition number squaring, offering a more stable approach to solving the least-squares problem.
Solving least-squares problems with the QR decomposition#
We assume in this section that \(m \ge n\) and that \(A\) has a full rank. The full \(QR\) decomposition of \(A\) can be expressed as follows:
where \(Q_1 \in \mathbb{R}^{m\times n}\) and \(Q_2 \in \mathbb{R}^{m\times (m-n)}\) have orthonormal columns, \(\begin{pmatrix}Q_1 & Q_2\end{pmatrix}\) is orthogonal, and \(R \in \mathbb{R}^{n\times n}\) is upper triangular. Substituting this decomposition into the least-squares problem, we get:
Here, we observe that the choice of \(x\) influences only the first block-row. In the second block row, \(x\) is multiplied by zero, meaning no choice of \(x\) will reduce the contribution from this part. Therefore, the minimiser \(\hat{x}\) of the least-squares problem is found by solving:
Returning to the question of the \(2\)-norm condition number:
because left multiplication by a matrix with orthonormal columns preserves singular values. Hence \(A\) and \(R\) have the same singular values.
Consequently, the \(QR\) decomposition approach effectively circumvents the condition number squaring issue associated with the normal equation method.
Solving least-squares problems with the SVD#
The SVD can also be used to solve least-squares problems. In this section, we assume that \(m \ge n\) but not that \(A\) has a full rank. The full SVD of \(A\) is
with \(\hat{\Sigma}\) as in the previous chapter. Substitute into the least-squares problem to obtain
Let \(y = V^\top x\), partitioned as \(y=\begin{pmatrix}y_1\\ y_2\end{pmatrix}\) with \(y_1 = V_1^\top x\) and \(y_2 = V_2^\top x\), and factor out \(U\) to obtain
The second block row cannot be influenced by the choice of \(x\), and the least-squares norm depends on \(y_2\) only through zeros. Hence \(y_1 = \hat{\Sigma}^{-1} U_1^\top a\), while \(y_2\) is arbitrary. Choosing \(y_2 = 0\) gives the minimum-norm minimiser
is the minimum-norm minimiser of the least-squares problem. This leads to the important concept of a pseudo-inverse of a matrix.
Definition 7 (Pseudo-inverse of a matrix)
Let \(U \Sigma V^\top\) be an SVD of \(A \in \mathbb{R}^{m \times n}\) and \(m \geq n\). Then the pseudo-inverse of \(A\) is
where \(\hat{\Sigma} \in \mathbb{R}^{r \times r}\) and \(r = \text{rank}(A)\).
The pseudo-inverse of \(A\) is a generalisation of the inverse of \(A\). In the same way that \(A^{-1}a\) solves the linear system \(Ax=a\) for a square matrix \(A\), the pseudo-inverse \(A^{\dagger}\) applied to \(a\) gives the minimum-norm least-squares solution for rectangular \(A\).
Python skills#
Solving a least-squares problem with QR decomposition#
The following example shows how to use NumPy’s QR decomposition to find the least-squares approximation
import numpy as np
from scipy.linalg import solve_triangular
# Define matrix A and vector a
A = np.array([[1, 2], [3, 4], [5, 6]])
a = np.array([7, 8, 9])
# Perform QR decomposition
Q, R = np.linalg.qr(A)
# Compute Q^T * a
Q_T_a = np.dot(Q.T, a)
# Solve Rx = Q^T a for x
x = solve_triangular(R[:A.shape[1], :], Q_T_a[:A.shape[1]])
print("Solution x:", x)
Solving a least-squares problem with SVD#
Here is a problem that is solved with the SVD.
import numpy as np
# Step 1: Define A and a
A = np.random.rand(5, 3) # A random 5x3 matrix
a = np.random.rand(5) # A random vector of length 5
# Step 2: Perform the reduced SVD
U, sigma, VT = np.linalg.svd(A, full_matrices=False)
# Step 3: Compute the pseudo-inverse
Sigma_inv = np.diag(1 / sigma)
A_pseudo_inverse = VT.T @ Sigma_inv @ U.T
# Step 4: Solve for x
x = A_pseudo_inverse @ a
print("Solution x:", x)
Self-check questions#
Question
Let’s consider three points: \((1, 2)\), \((2, 3)\), and \((3, 5)\). Find the best-fitting line \(y = m x + c\) in the least-squares sense:
Answer
The minimisation problem can be equivalently formulated as
We learned three methods to proceed: solve the normal equation, the QR reformulation or the SVD reformulation. The two latter choices are preferable for bigger problems solved with a computer. However, for hand calculations of small problems, solving the original normal equation is often the most convenient approach.
We have
and
Thus, the minimiser solves
giving \((\hat{c}, \hat{m}) = (1/3, 3/2)\).
Remark One can plot an illustration of the calculation with Python.
import matplotlib.pyplot as plt
import numpy as np
# Given points
x_points = np.array([1, 2, 3])
y_points = np.array([2, 3, 5])
# Given least-squares solution
c = 1.0/3.0
m = 3.0/2.0
# Line of best fit
x_line = np.linspace(0, 4, 100)
y_line = m * x_line + c
# Plotting
plt.figure(figsize=(8, 6))
plt.plot(x_line, y_line, label=f'Best Fit Line: y = {m:.2f}x + {c:.2f}', color='red')
plt.scatter(x_points, y_points, label='Data Points', color='blue')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Least-squares Line Fit')
plt.legend()
plt.grid(True)
plt.show()
Question
Let \(x=(0,0.25,0.5,0.75,1)\).
Find a least-squares quadratic approximation to \(\{(x_i,\exp(x_i))\}\).
Find a least-squares quadratic approximation to \(\{(x_i,\cos(x_i))\}\).
Answer
The quadratic approximation is of the form \(p_2(x) = a \, x^2 + b \, x + c\). The minimisation problem can be equivalently formulated as
\[\begin{split} \text{arg}\min_{(a,b,c) \in \mathbb{R}^3} \left\| \begin{pmatrix} x_1^2 & x_1 & 1\\ x_2^2 & x_2 & 1\\ x_3^2 & x_3 & 1\\ x_4^2 & x_4 & 1\\ x_5^2 & x_5 & 1\end{pmatrix} \begin{pmatrix} a\\ b\\ c \end{pmatrix} - \begin{pmatrix} \exp(x_1)\\ \exp(x_2)\\ \exp(x_3)\\ \exp(x_4)\\ \exp(x_5) \end{pmatrix} \right\|^2. \end{split}\]The normal equations in matrix form are:
\[\begin{split} \begin{pmatrix} \sum_i x_i^4 & \sum_i x_i^3 & \sum_i x_i^2 \\ \sum_i x_i^3 & \sum_i x_i^2 & \sum_i x_i \\ \sum_i x_i^2 & \sum_i x_i & n \end{pmatrix} \begin{pmatrix} a \\ b \\ c \end{pmatrix} = \begin{pmatrix} \sum_i (x_i^2 y_i) \\ \sum_i (x_i y_i) \\ \sum_i y_i \end{pmatrix} \end{split}\]where \(y_i = \exp(x_i)\) and \(n\) is the number of data points. Therefore, the least-squares quadratic approximation is given by:
\[ p_2(t)=1.005+0.8643t+0.8435t^2. \]Analogously, the approximation is \(p_2(t)=1.001-0.03389t-0.4288t^2\).
Question
For many applications, one must obtain polynomial least-squares approximations at the same nodes \(\{ x_i \}\) for many different sets of data \(\{y_i\}\). What is the best way to do this? Only try to answer this after having worked out the two previous questions.
Answer
The matrix \(A\) of the normal equation \(A^\top A\hat{x} = A^\top a\) depends on \(\{ x_i \}\), but not \(\{y_i\}\). Compute the QR or singular value decomposition of \(A\) once, and apply it for each of the different \(\{y_i\}\).
Question
Let \(A\in\mathbb{R}^{m\times n}\) with \(m\geq n\) and \(\text{rank}(A)=n\) and \(a\in\mathbb{R}^m\). How should one approach the following least-squares problem with the SVD? Find \(\hat{x}\in\mathbb{R}^n\), such that
Answer
The SVD of \(A\) is given as \(A=U\Sigma V^\top\), where \(U\in\mathbb{R}^{m\times m}\) and \(V\in\mathbb{R}^{n\times n}\) are orthogonal matrices and \(\Sigma \in\mathbb{R}^{m\times n}\) is a diagonal matrix with the nonzero singular values \(\sigma_1\geq\sigma_2\geq\dots\geq\sigma_n >0\) in decreasing order on the diagonal of the matrix, using that \(A\) has full rank.
Substituting into the least-squares problem, we have
for \(y=V^\top x\) and \(\hat{a} = U^\top a\). We find \(y_j\) as \(y_j = \hat{a}_j/\sigma_j\) by minimising the above expression. This is equivalent to \(x = A^{\dagger} a\).
Question
We now consider the modified least-squares problem
with \(L\in\mathbb{R}^{n\times n}\) nonsingular. Show that the solution of this least-squares problem is identical to the solution of
Answer
The vector \(\hat{x}\) minimises the least-squares problem if and only if for all \(\epsilon\in\mathbb{R}^n\):
Step 1: Suppose that \(\hat{x}\) does not satisfy the generalised normal equation \((A^\top A+L^\top L)x = A^\top a.\). Then \(\| (A^\top A + L^\top L) \hat{x} - A^\top a \|_2 > 0\). Suppose that \(\hat{x}\) minimises the least-squares problem. With \(\epsilon := \delta ((A^\top A + L^\top L) \hat{x} - A^\top a)\), \(\delta \in \mathbb{R}\), the above implies
This is a contradiction because \(\Phi(\delta) < 0\) for small negative \(\delta\).
Step 2: Suppose that \(\hat{x}\) satisfies the generalised normal equation. Then, by the above,
ensuring that \(\hat{x}\) is a minimiser.
Question
Let
What is the pseudo-inverse of \(A\)? Describe all solutions of the least-squares problem \(\text{arg}\min_x \|Ax - a\|_2\).
Answer
The pseudo-inverse is
The pseudo-inverse selects the solution \((1,0)^\top = A^{\dagger} a\). Clearly, the \(x_2\) component does not affect the value of \(A x\) so that the solutions of the least-squares problem are of the form \((1, x_2)^\top\), \(x_2 \in \mathbb{R}\).
Optional material#
Principles of orthogonal approximation
Definition 8
Let \(V\) be a vector space over ,\(\mathbb{K} \in \{ \mathbb{R}, \mathbb{C} \}\). A mapping
is called a scalar product if the following conditions hold:
conjugate symmetry:
\[ \forall \, v, w \in V : s(v,w) = \overline{s(w,v)}. \]linearity:
\[ \forall \, u,v,w \in V \; \forall \, \alpha, \beta \in \mathbb{K} : \; s(\alpha v + \beta w, u) = \alpha \, s(v,u) + \beta \, s(w,u). \]positivity:
\[ \forall \, v \in V \setminus \{ 0 \} : \; s(v,v) > 0 \]
The positivity condition is meaningful because conjugate symmetry ensures that \(s(v,v) = \overline{s(v,v)}\) is real-valued.
Often, one denotes scalar products with angle brackets: \(s(v,w) = \langle v, w \rangle\). Scalar products are also called inner products, and vector spaces equipped with a scalar product are called inner product spaces.
Fact: Interpolation error bound
Let \((V, \langle \cdot, \cdot \rangle)\) be an inner product space. Then, the mapping \(v \mapsto \sqrt{\langle v, v \rangle}\) defines a norm.
Example 10
(a) Let \(A\) in \(\mathbb{R}^{n \times n}\) be a symmetric, positive definite matrix. Then the mapping
is a scalar product on \(\mathbb{R}^n\). The canonical scalar product is defined with \(A\) being the identity matrix \(I\).
(b) Let \(A\) in \(\mathbb{C}^{n \times n}\) be a Hermitian, positive definite matrix, i.e. \(A = A^H\). Then the mapping
is a scalar product on \(\mathbb{C}^n\).
(c) Let \(\Omega \subset \mathbb{R}^n\) be open and non-empty. Let \(\gamma \in C(\Omega, \mathbb{R})\) be positive, i.e. \(\gamma(x) > 0\) for all \(x \in \Omega\). The set of Riemann integrable functions \(v : \Omega \to \mathbb{K}^m\) for which
is finite is denoted \(L^2_\gamma(\Omega, \mathbb{K}^m)\). It is a vector space closed under pointwise addition and scalar multiplication. It is equipped with a scalar product.
If \(\gamma \equiv 1\), then \(L^2(\Omega, \mathbb{K}^m) := L^2_\gamma(\Omega, \mathbb{K}^m)\) and \(\langle \cdot, \cdot \rangle_{\Omega} := \langle \cdot, \cdot \rangle_{\Omega,\gamma}\).
Two vectors \(v,w \in V\) are called orthogonal if \(\langle v, w \rangle = 0\). A subspace \(P \subset V\) is called orthogonal to \(v \in V\) if \(\langle v, p \rangle = 0\) for all \(p \in P\).
Fact: Orthogonal approximation
Let \((V, \langle \cdot, \cdot \rangle)\) be an inner product space. Let \(P\) be a finite-dimensional subspace of \(V\) and \(v \in V\). Then there is a unique best approximation \(p \in P\) to \(v\) in \(P\), which is distinguished by the condition
In words, \(v-p\) is orthogonal to \(P\).
Suppose that \(P\) has the basis
i.e. each element \(q\) can be written as a linear combination
where the coefficients \(x_j \in \mathbb{K}\) are unique for each \(q\). In particular there are coefficients \(\hat{x}_0, \ldots, \hat{x}_k\) in \(\mathbb{R}\) of the best approximation \(p\):
It follows from the above fact that, for all \(\ell \in \{ 0, 1, \ldots, k \}\),
and thus that
Hence, the best approximation can be computed by solving
where \(A\) contains the entries \(a_{j\ell} = \langle p_j, p_\ell \rangle\) and \(a\) contains the entries \(a_\ell = \langle v, p_\ell \rangle\).
Fact: Orthogonal approximation
The matrix \(A\) is positive definite and therefore invertible.
Example 11
Let \(\Omega = (-1,1)^2\) be non-empty, open and \(V = L^2(\Omega, \mathbb{R})\). Let \(P = \mathcal{P}_{1,2}\) be the space of \(2\)-variate polynomials with degrees less than or equal to \(1\). The space \(\mathcal{P}_{1,2}\) has the basis
because for every \(q \in P\) there is exactly one triple \((x_{00}, x_{10}, x_{01}) \in \mathbb{R}^3\) such that
The double index notation is convenient to \(2\)-variate functions; however, one could equally well also denote the basis by \(p_0\), \(p_1\), \(p_2\) and the coefficients by \(x_0\), \(x_1\), \(x_2\). In the double index notation, the first index marks the degree in \(t_1\) and the second in \(t_2\).
The best approximation to \(v \in L^2(\Omega)\) can be computed by solving a \(3 \times 3\) linear system. Using also double indices for the matrix entries, one has
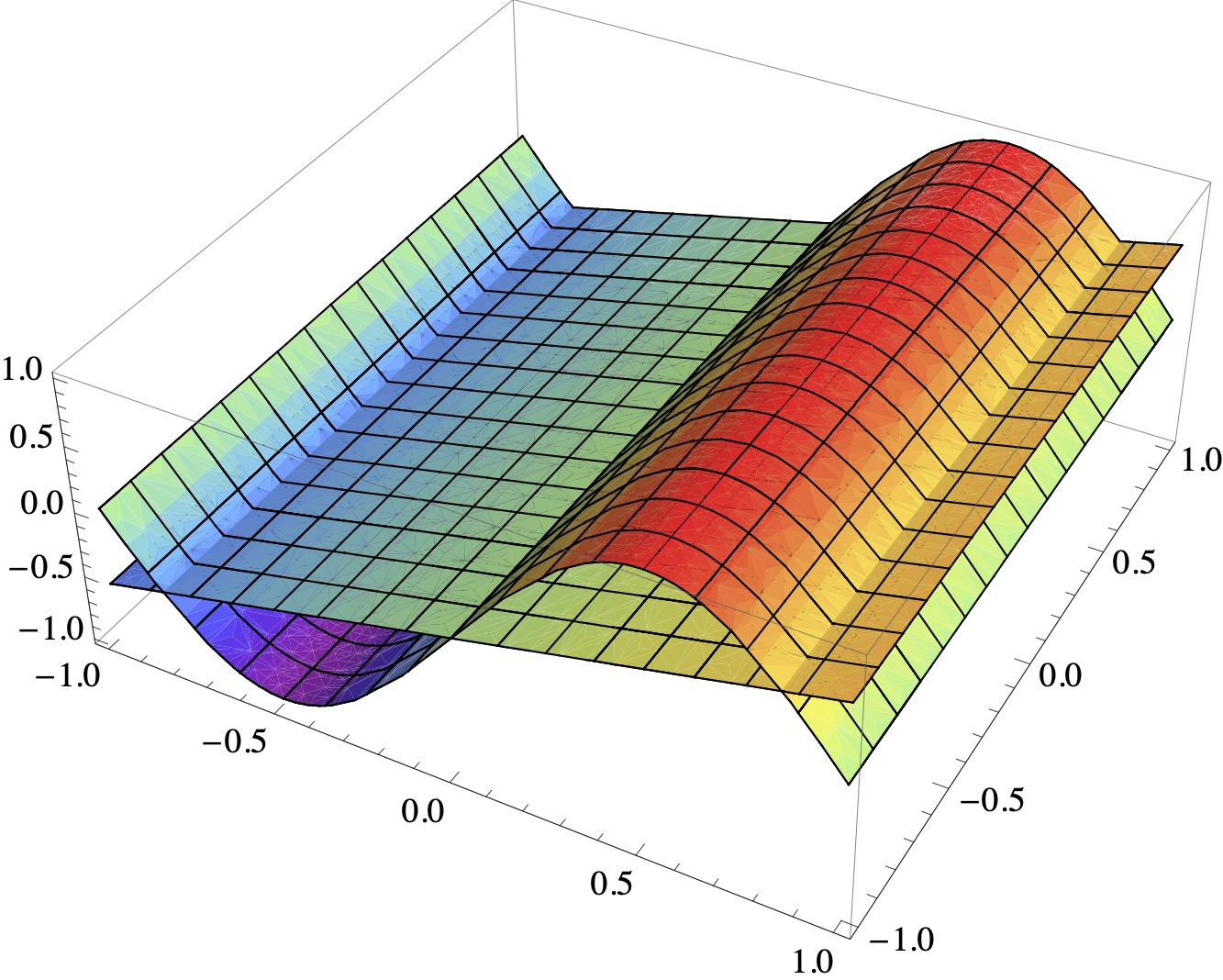
The right-hand side depends on \(v\). Choosing \(v(t_1,t_2) = \sin (\pi t_1)\) one obtains
The resulting linear system is
The solution of the system is \((0,\frac{3 \pi}{16},0)\) and therefore the best approximation is
The functions \(v\) and \(p\) are depicted here:
A remarkable feature of the example is that all off-diagonal entries in \(A\) vanish. This means that the basis functions are mutually orthogonal. In general, one cannot expect this. For instance, one can show that the functions
are a basis of \(\mathcal{Q}_{2,2} := \text{span}(p_{00}, \ldots, p_{22})\). Computing, for example,
implies that orthogonality is lost and that the matrix \(A\), implementing \(L^2\) approximation in \(\mathcal{Q}_{2,2}\) with \(p_{00}, \ldots, p_{22}\) as underlying basis, has off-diagonal entries.
One can already observe in the 1-dimensional case that the basis of the approximation space \(P\) needs to be chosen carefully. For instance, if \(P = \mathcal{P}_n\) with basis \(1, t, t^2, \ldots, t^n\), then the resulting matrix \(A\) is poorly conditioned for larger and even moderate values of \(n\). However, the `more orthogonal’ the basis functions are, the better conditioned the linear system is. In the ideal case, the basis is orthonormal, implying that \(A = I\).
There are different options to obtain an orthonormal basis in multivariate space. One can use the Gram-Schmidt method, which works for all (finite-dimensional) inner product spaces. For instance, one can start with the above \(p_{00}, \ldots, p_{22}\) to generate an orthonormal basis of \(\mathcal{Q}_{2,2}\) with this method.
However, assembling the multivariate basis from an orthonormal \(1\)-variate basis is often more economical. Let \(p_\alpha, p_\beta\) be orthogonal functions in \(L^2_\gamma((a,b),\mathbb{K}^m)\). Then the functions
are orthogonal in \(L_\eta^2((a,b)^2, \mathbb{K}^m)\) with \(\eta(t_1,t_2) = \gamma(t_1) \cdot \gamma(t_2)\) because
with \(i, j, k, \ell \in \{ \alpha, \beta \}\). In particular, if \(p_\alpha\) and \(p_\beta\) are orthonormal, then the products \(p_\alpha \cdot p_\beta\) are orthonormal.
Let us use this argument to construct an orthogonal basis of \(\mathcal{Q}_{2,2}\). Functions in \(\mathcal{Q}_{2,2}\) have the form
Recall that the \(t_1^j t_2^k\) are a basis of \(\mathcal{Q}_{2,2}\). Even without the proof that they are, in fact, a basis (which was omitted), one can directly conclude that \(\mathcal{Q}_{2,2}\) spanned by the \(9\) functions \(t_1^j t_2^k\), which means that \(\mathcal{Q}_{2,2}\) can at most be \(9\) dimensional.
We leave it as an exercise to check that the so-called Legendre polynomials
are orthogonal in \(L^2((-1,1), \mathbb{R})\). Consequently, the functions
are orthogonal in \(L^2((-1,1)^2, \mathbb{R})\).
Fact: Independence of orthogonal vectors
Mutually orthogonal vectors in an inner product space \((V, \langle \cdot, \cdot \rangle)\) are linearly independent.
Thus, the \(p_{jk}\) are linearly independent. Moreover, the \(p_{jk}\) belong to \(\mathcal{Q}_{2,2}\). For instance,
has the structure a linear combination in the original span with \(\alpha_{1,2} = \frac{3}{2}\) and \(\alpha_{0,0} = -\frac{1}{2}\).
Fact: Basis of orthogonal vectors
A selection of \(n\) linearly independent, nonzero vectors in an \(n\)-dimensional vector space \(V\), \(n \in \mathbb{N}\), is a basis of ,\(V\).
Therefore the \(p_{jk}\) are a basis of \(\mathcal{Q}_{2,2}\). The matrix \(A\) above is diagonal if the \(p_{jk}\) are orthogonal.
Example 12
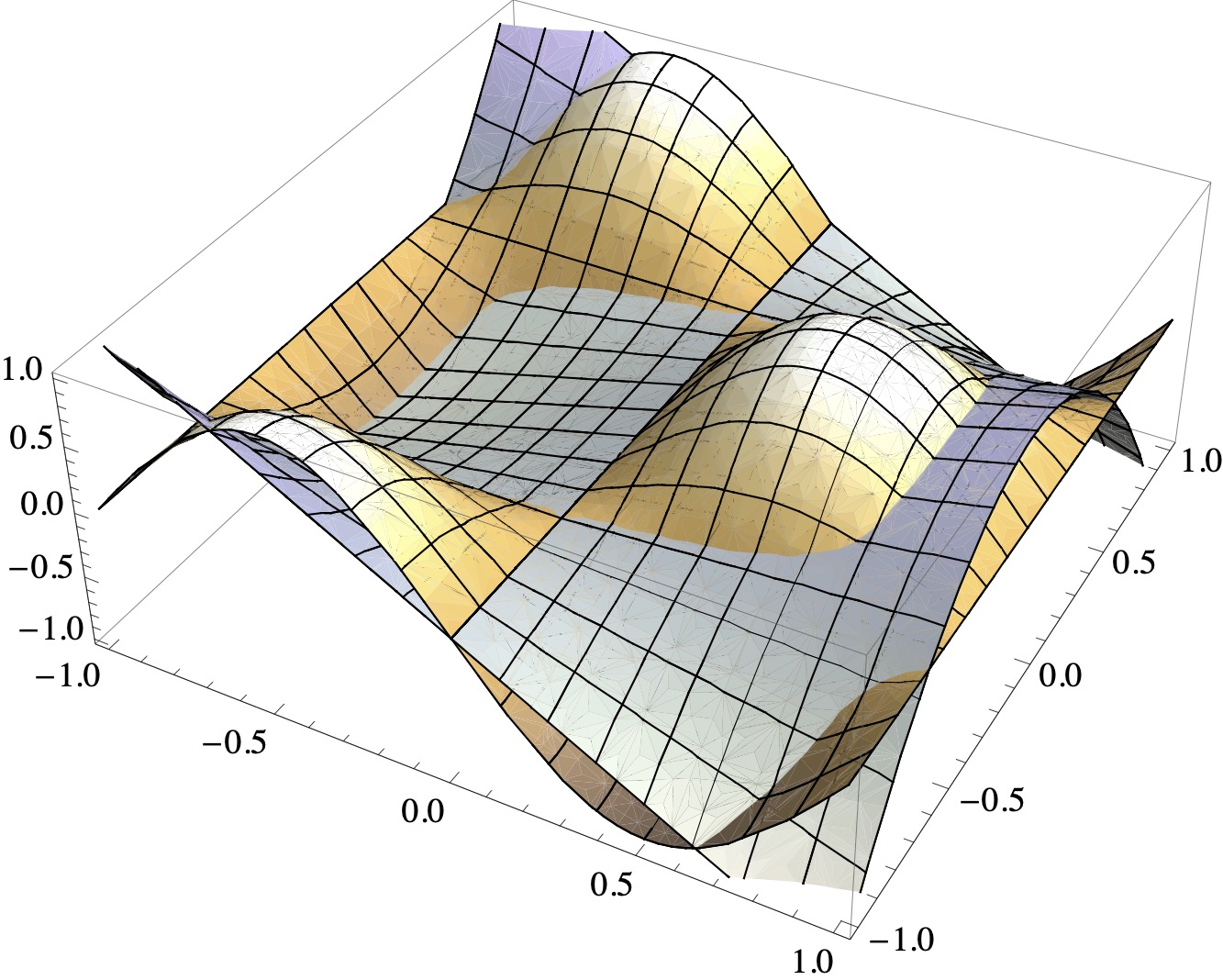
Let \(V = L^2((-1,1)^2, \mathbb{R})\). Compute the best approximation \(p\) to
in \(P = \mathcal{Q}_{2,2}\).
We use the Legendre product basis for the computation. Then the coefficients \(\hat{x}_{jk}\) in
are given by
taking the diagonal structure of the system into account. One calculates
Therefore, the system of equations turns into
Furthermore,
Therefore